- World's first all-wheel drive system with active torque-vectoring technology, introduced in 2005
- Now in its fourth-generation, Super Handling All-Wheel Drive™ (SH-AWD®) is available on MDX, RDX and TLX
- Standard on high-performance Type S models, 4th-generation SH-AWD® is engineered for Type S levels of torque and horsepower
Super Handling All-Wheel Drive™ (SH-AWD®) has been a cornerstone of Acura performance for nearly two decades and today remains one of the most advanced all-wheel drive systems in the world. Evolved from the Variable Torque Management all-wheel drive system (VTM-4®) that debuted on the 2001 Acura MDX, SH-AWD® was introduced in 2005 as the world's first all-wheel drive system to apply the concept of active torque vectoring to enhance handling agility in addition to providing stability in slippery weather conditions.
Now in its fourth-generation, SH-AWD® has evolved to become more compact and even more capable. Compared to the system's previous generation, the quickness of its reactions has jumped 30%, and to handle the output of Acura's all-new 355-horsepower Type S Turbo V6, its torque capacity has been increased 40%. SH-AWD® is standard on the brand's high-performance Type S models and is available on the Acura TLX, RDX and MDX.

History of the SH-AWD® System
Two earlier technologies used in Honda and Acura vehicles laid the groundwork for SH-AWD®. Active Torque Transfer System (ATTS) was introduced on the 1997 Honda Prelude Type SH, followed by the Variable Torque Management® four-wheel drive system (VTM-4®) on the 2001 Acura MDX.
ATTS used a pair of electronically controlled clutches to actively send up to 80% of engine torque to the outside wheel when cornering, actively overdriving that wheel up to 15%. ATTS not only offered traction management enhancement similar to a limited-slip differential, but the active torque vectoring of overdriving the outside wheel helped significantly reduce understeer, giving the Prelude Type SH handling characteristics more commonly associated with all-wheel drive cars.
For the 2001 MDX, Acura's first crossover, engineers sought an all-wheel drive system that would automatically distribute torque to all four wheels as needed, but in a compact and lightweight package. The resulting Variable Torque Management® all-wheel drive system (VTM-4®) used a single-speed torque transfer unit bolted directly to the transaxle and an electromagnetic clutch mounted on each side of the rear differential.
During normal operation the clutches were disengaged, allowing the rear axles to freewheel, delivering all engine power to the front wheels. However, if the system's sophisticated ECU anticipated wheel slippage, the clutches would lock, routing power to the rear wheels to maximize available traction, such as when launching hard from a stop or in slippery conditions. Drivers could also press a VTM-Lock® button on the dash to temporarily engage the rear wheels to help aid traction management in situations such as a snow bank or slippery ditch.

2005 Acura RL, first production car with SH-AWD®
Super Handling All-Wheel Drive™, which debuted on the 2005 Acura RL, applied the benefits of the active torque vectoring used on ATTS to the rear axle of the VTM-4® all-wheel drive system, creating the world's first all-wheel drive system with active torque vectoring. Its unique design not only provided improved traction management in poor weather, but also improved handling in ways no other all-wheel drive system had before. Since its introduction, SH-AWD® has evolved over four generations to be lighter, quicker reacting and handle a much higher torque capacity.
Mechanics of the SH-AWD® System
To enhance both handling and stability, SH-AWD® can send up to 70% of engine torque to the rear wheels and actively distribute up to 100% of that torque to a single left or right wheel. This is achieved by routing the power generated by the vehicle's engine to a transaxle, while power is sent to the rear wheels through a torque transfer unit mounted up front rather than a traditional center differential.
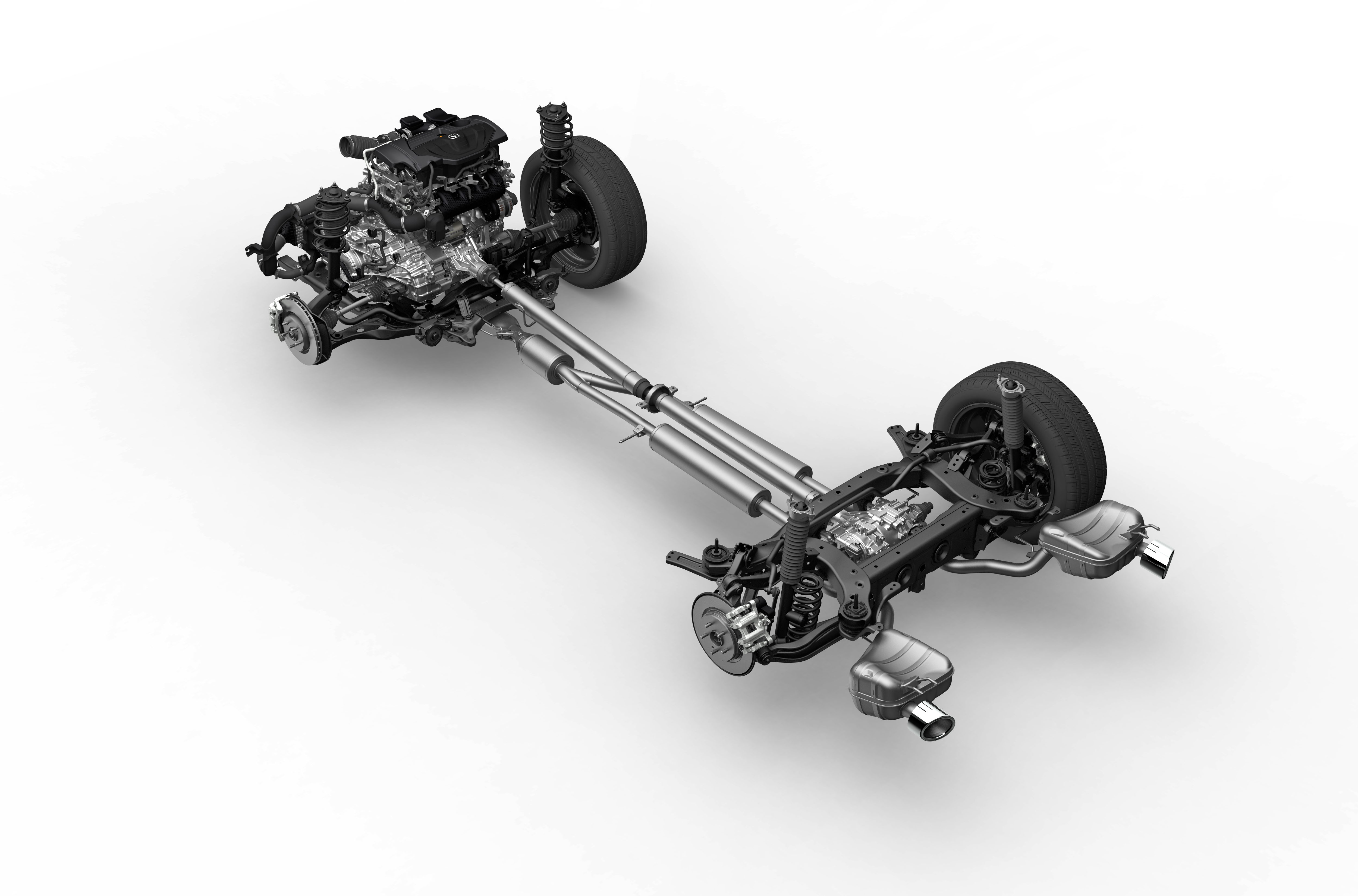
2019 Acura RDX 4th-generation SH-AWD® system
Mounted alongside the front transaxle, the torque-transfer unit receives torque from a helical gear that is attached to the front differential's ring gear. From there, a short horizontal shaft and hypoid gear set within the torque-transfer unit's case send power to the rear drive unit though a lightweight driveshaft.
Controlling the torque split between the rear wheels falls to two hydraulically operated clutch packs, one for each rear wheel. The clutch packs are activated with an electric motor that powers a single hydraulic pump for each pack. The SH-AWD® Electronic Control Unit (ECU) controls a pair of linear solenoids by selectively sending pressure to the packs, which controls the amount of power sent to each rear wheel. Together, the clutch packs control the front-to-rear torque split, and when controlled independently, they can send all of the rear-wheel torque to a single rear wheel.
SH-AWD® uses multiple inputs to determine how much torque to send to the rear wheels and how much to distribute to the left and right, including input from the SH-AWD® ECU, and the engine and Vehicle Stability Assist™ (VSA®) ECUs. The SH-AWD® ECU monitors steering angle, lateral g-forces, vehicle yaw rate and electromagnetic clutch engagement for the right and left rear axle shafts, while the engine ECU provides information on engine rpm, airflow and transmission gear-ratio selection, and the VSA® ECU provides wheel-speed data. The SH-AWD® system also works in conjunction with VSA® and Agile Handling Assist to optimize torque distribution for superior handling and traction utilization.
Performance Benefits of Torque Vectoring SH-AWD®
In addition, SH-AWD® overdrives the vehicle's rear axle by 2.7%, giving the rear wheels the capability to spin faster than the fronts to create a yaw moment at the rear of the car. This is key to the system's torque-vectoring function.
The left and right turning motion of a vehicle is known as "yaw." In conventional cars, this motion is created almost entirely by steering input, applying rotational torque to the vehicle body. However, in some dynamic situations, the front wheels can become overwhelmed with the multiple tasks of steering the car, supporting a large part of the vehicle's weight, and in the case of front-wheel drive vehicles, delivering power. This can cause the front tires to lose traction well before the rear tires, a condition known as "understeer."
By contrast, a rear-wheel drive vehicle can use the power at the rear wheels to help induce a yaw moment at the rear. Known as "oversteer," this can make a rear-wheel drive vehicle feel more nimble, but too much oversteer can make a vehicle unstable and cause a spin.
Conventional all-wheel drive systems seek a compromise between front and rear-wheel drive by routing power to the front and rear at the same time to increase stability. The downside to this is that the front wheels are still primarily responsible for inducing the yaw moment, making the car feel less nimble as a result. The fact that the steering is primarily responsible for the yaw moment are why traditional AWD systems typically lack the agile feel of the best two-wheel drive systems.
Super Handling All-Wheel Drive® combines the nimbleness of a rear-wheel drive vehicle, while maintaining all-wheel drive stability. This agility is due to the overdriven rear-drive unit, and how the system independently controls power delivery to both the left and right rear wheels.
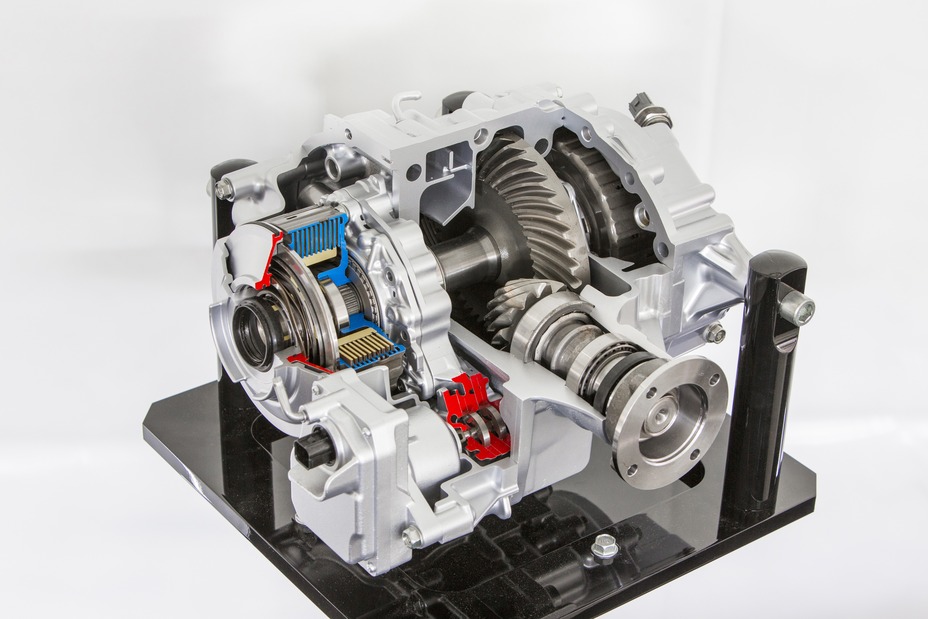
Cutaway of third-generation SH-AWD® rear differential showing cutaway of clutch pack (blue)
When cornering, SH-AWD® turns the outside rear wheel faster than the average speed of the two front wheels. This helps create a new yaw moment at the rear of the vehicle, relieving the front tires of some of the work of turning the car, reducing understeer to keep the vehicle balanced and controllable. In addition, with the cornering load more evenly distributed between the front and rear tires, the total cornering grip is more fully realized.
This active use of drive torque to help turn the car makes the vehicle more responsive, nimble, and predictable, while maintaining the stability inherent in all all-wheel drive systems. The system has benefits in straight-line acceleration too, sending more power to the rear wheels to help balance power distribution, eliminating wheelspin for fast and repeatable launches.
Foul Weather and Off-Road Performance
SH-AWD® optimizes available traction in all conditions by distributing power to all four wheels, with its active torque vectoring providing unique advantages over other all-wheel drive systems. In wet or slippery conditions, especially winter conditions such as snow, SH-AWD® can help stabilize the vehicle when accelerating from a stop by actively routing power to the rear wheel with the most traction.
As traction conditions change once the vehicle begins moving, the system's quick reactions can help stabilize the vehicle. When driving on a curving road in wet weather, SH-AWD® continues to help maintain maximum traction and stability by constantly adjusting and optimizing how torque is routed.
In off-road situations, SH-AWD® will continue to route torque where it can do the most good, helping maintain traction and stability in mud and deep sand. SH-AWD® even continues to work in extreme conditions, such as when one rear wheel is off the ground, by sending power to the wheel in contact with the ground to pull the vehicle through and ensure momentum.
Sport Hybrid SH-AWD®
The function of SH-AWD® is distinct from Sport Hybrid SH-AWD®, which has been used on several Acura models, including the NSX supercar. This system uses a pair of electric motors independently powering two wheels, with a gasoline engine with electric motor powering the other pair. Working together, the Sport Hybrid SH-AWD® system achieves torque-vectoring benefits similar to the non-hybrid version.
For more information on the Sport Hybrid version of Super Handling All-Wheel Drive®, click here.
Cornerstone of Precision Crafted Performance
Acura is the only premium performance brand to offer the capabilities of torque-vectoring all-wheel drive as the sole AWD option on its vehicles. The newest 4th generation of SH-AWD® is capable of handling more power and torque than ever before, including the prodigious torque produced by the new Type S Turbo V6 used in the TLX Type S and MDX Type S.
Combined with Acura's sharp steering, performance tuned suspensions, responsive engines and quick-shifting transmissions, SH-AWD® continues to be a cornerstone of Acura's Precision Crafted Performance commitment.
Acura SH-AWD®: Through the Years
1st Generation SH-AWD® |
|
|
Applied on: |
About: |
|
RL (2005-2012) |
World's first all-wheel drive platform that actively and continually distributed torque not only to optimize traction, but also to elevate cornering performance. This first-generation system used an Acceleration Device to overdrive the rear wheels by more than 5%, creating the inward yaw moment while accelerating into and through corners. |
|
2nd Generation SH-AWD® |
|
|
Second-generation SH-AWD® reduced complexity by doing away with the Acceleration Device, instead overdriving the rear-end by 1.7%. It also integrated Hill Logic as an enhancement, automatically adjusting the front/rear torque split based on the grade of the underlying surface as well the integration of Vehicle Stability Assist™ (VSA®) and, in 2009, Traction Control Systems (TCS). |
|
|
3rd Generation SH-AWD® |
|
|
Third-generation SH-AWD® system used a 25% lighter rear differential with reduced friction and increased yaw effect. The rear was constantly overdriven by 2.7% to provide a greater torque-vectoring effect across a broader spectrum of driving conditions to further enhance cornering capability. |
|
|
4th Generation SH-AWD® |
|
|
RDX (2019-Present) |
Newest version of Acura's mechanical SH-AWD® is more compact, with a 30% faster reaction time. It has also been reengineered for a 40% increase in maximum torque capacity for Type S performance models. |
# # #




